







 70 / 156
70 / 156

Page 58
Chapter 3: Motors
Electrical Theory & Applications for HVACR
SPLIT-PHASE MOTORS
For higher starƟng torque, a start winding is required. The start winding establishes another
magneƟc field in the stator that is out of phase (out of step) with the main winding. These are called
split‐phase motors. The phase angle, or difference in magneƟc force, of the start winding can be
accomplished using different methods. For the split phase motor, the start winding placement
relaƟve to the run (main) winding, higher resistance and lower inducƟve reactance will give the motor
starƟng torque.
Start windings are made with smaller diameter wire than run windings and have more turns on their
laminated poles. This higher resistance in a start winding produces a magneƟc field that lags the run
winding.
At start‐up, current flows through both windings. MagneƟsm in the start winding is slightly behind
the run winding due to its higher resistance. These two magneƟc fields, one behind the other, create
the necessary turning force on the rotor.
DIRECTION OF ROTATION
RotaƟon, clockwise or counter‐clockwise, is always
determined by the direcƟon of current flowing
through the start winding. To reverse rotaƟon, the
two power supply connecƟons to the start winding
must be reversed. This reverses current flow through
the start winding, causing opposite polarity and
rotaƟon.
In open motors, the electrical connecƟons are located
at one end of the motor, called lead end, and the
motor shaŌ exits the opposite end, called the shaŌ
end. RotaƟon direcƟon is usually determined by
viewing the shaŌ end. However, rotaƟon for General
Electric motors is determined by viewing the lead
end.
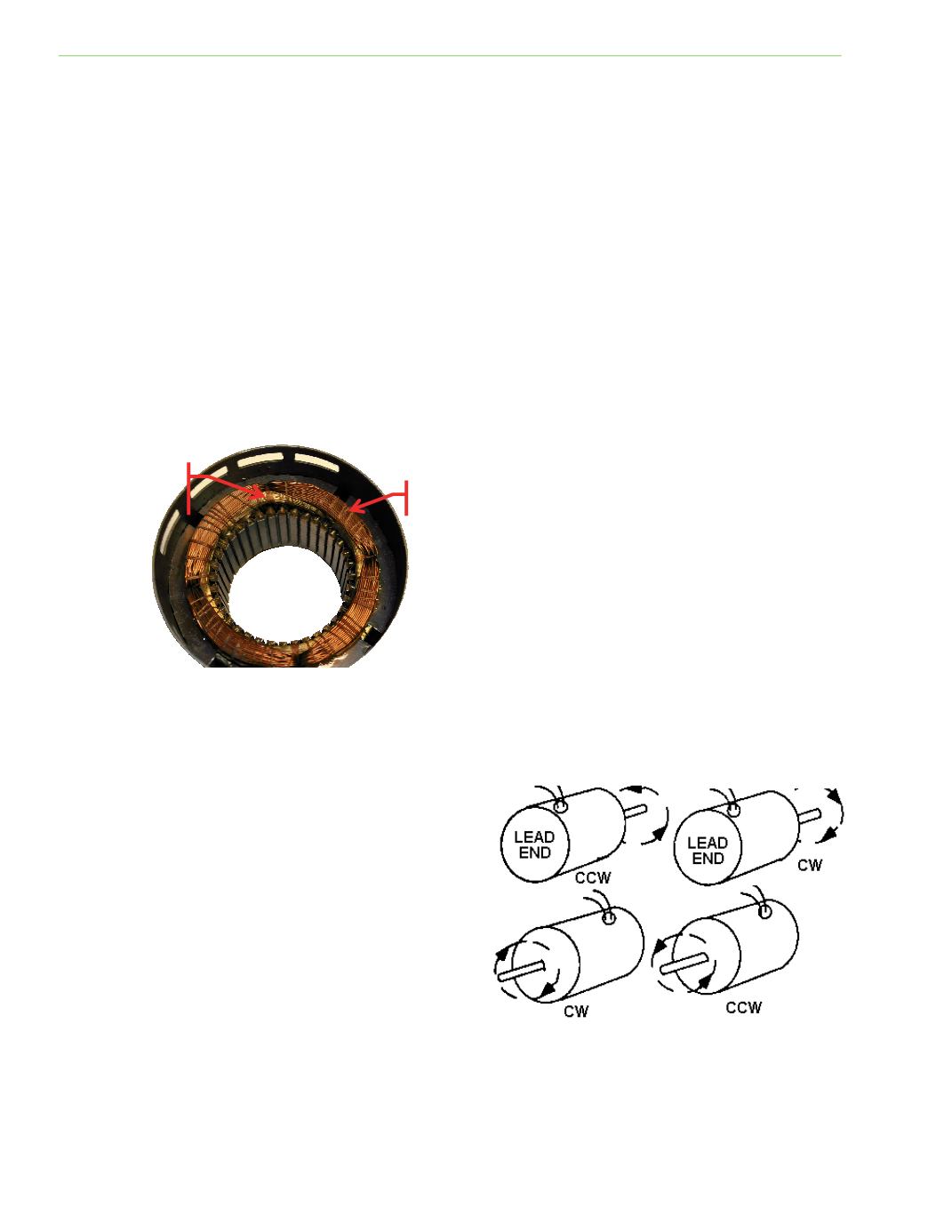
RUN WINDING
START WINDING
Fig. 3‐8: The start winding creates a magneƟc field that
is out of phase with the run winding
Fig. 3‐9: RotaƟon of motor shaŌ depends on which
end of the motor is being viewed